What is going on at the beginning of the robot of home appliances?
Mr. Furuta later studied mechanical engineering at the Faculty of Science and Engineering of the university, and in 1998 he belonged to the Kitano Symbiotic System Project of the Science and Technology Agency.He develops the humanoid robot "Morph2" and is in the spotlight.In 2003, he became the director of the Future Robotics Technology Center (Future Robotics Technology Center), creating various robots.
Mr. Furuta describes the current limit of the machine and the ideal robot image as follows.
"Machines with immature technology are still inconvenienced. For example, cars can move only where the ground is flat.The road is paved, but if the technology becomes advanced and the car proceeds in the wilderness, such environments will not be necessary. "
The feature of the robot developed by Mr. Furuta is to transform.By deforming, it can increase the adaptability to the environment.
"There is a word barrier -free, but if the wheelchair is deformed according to the environment, barrier -free will not be necessary. For example, on a flat ground, it runs on a wheel, and the legs come out on the uneven roads and stairs.I just need to start walking. "
fuRoで開発された未来のモビリティ「ILY-A」
The form changes depending on the environment where the user moves and the desired application.The latest machine that forms such an ideal is the one-seater electric small mobility "ILY-A".
"ILY-A" is transformed into four forms: "Vehicle Mode", "Kickboard Mode", "Cart Mode" and "Carry Mode".You can move, ride sporty, carry luggage, and fold it compactly when not in use.
「vehicle mode」「kickboard mode」「cart mode」「carry mode」の4形態に変形However, the epoch-making point of "ILY-A", which is not known from the exterior, is that it is equipped with "intelligence safety technology" that applies robot technology in a small housing like a stroller.It recognizes people and obstacles that suddenly pop out, and automatically decelerate the body.
This is to grasp the surrounding surrounding situation by using a real -time map creation technology using a laser sensor under the handle.In other words, the user turns the slide pad on the handle in the direction you want to go.That alone is a mobility that everyone can easily manipulate, which can be safely reached the destination.
"As technology becomes more and more advanced, it becomes friendly to people (users). Robot technology should be used in that way. So, if the robot technology enters home appliances, it would be that direction. I think"
fuRoの開発室で見たHalluc II(ハルクツー)の初期モデル。8つの脚を持ち、車輪で動くことも、歩くこともできる走行モード時の足先歩行モード時の足先歩いているところ
![What is "thousand eyes" at night? [Techniques for listening to jazz - the road to becoming a jazz "professional listener" 126]](https://website-google-hk.oss-cn-hongkong.aliyuncs.com/drawing/article_results_9/2022/3/28/9b839a325eb3ad18a729c92cc52aa70b_0.jpeg)

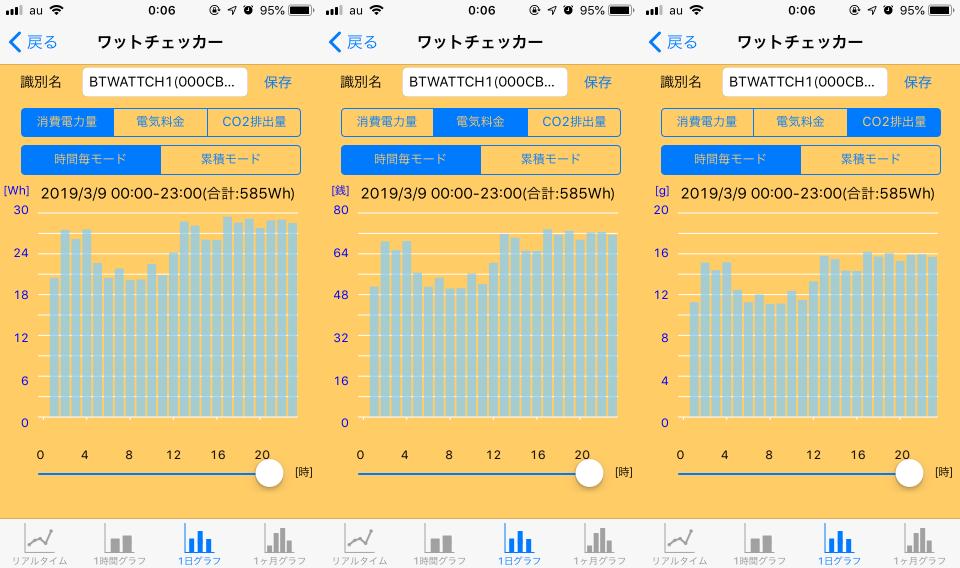
![[EV's simple question ③] What is good for KWH, which represents the performance of the battery?What is the difference from AH?-WEB motor magazine](https://website-google-hk.oss-cn-hongkong.aliyuncs.com/drawing/article_results_9/2022/3/9/b2506c4670f9f2cb45ffa076613c6b7d_0.jpeg)
![[How cool is the 10,000 yen range?] 1st: The performance of the "robot vacuum cleaner with water wiping function (19800 yen)" like Rumba is ...](https://website-google-hk.oss-cn-hongkong.aliyuncs.com/drawing/article_results_9/2022/3/25/5251bb14105c2bfd254c68a1386b7047_0.jpeg)